1. LIO-SAM 핵심 개념
-Tightly-coupled fusion
→ LiDAR와 IMU 데이터를 하나의 최적화 문제로 강하게 결합
- Factor-graph based estimation
→ 요인 그래프(Factor Graph)로 포즈와 상태를 동시에 추정
- Old scan marginalization → Pose optimization
→ 오래된 스캔은 제거(마진화)하고, 최신 스캔 중심으로 자세 최적화
- Local scan matching for real-time
→ 국소적인 스캔 매칭만 수행하여 실시간 처리 가능
- Sliding window
→ 일정 구간(윈도우) 안의 데이터만 유지하며 연속적으로 최적화
2. FLOW
- 전체 메인 코드는 이렇게 이루어지고 그 중 두 프로세스(Feature Extraction, Image Projection)는 라이다 데이터를 전처리 하는데 사용됩니다.
3. Main Code
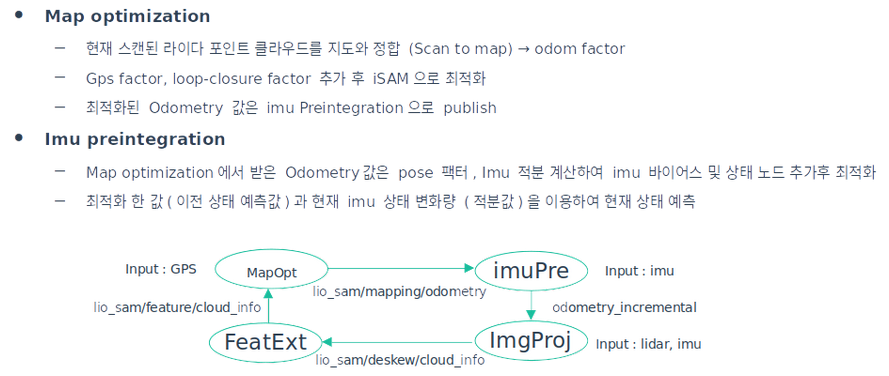
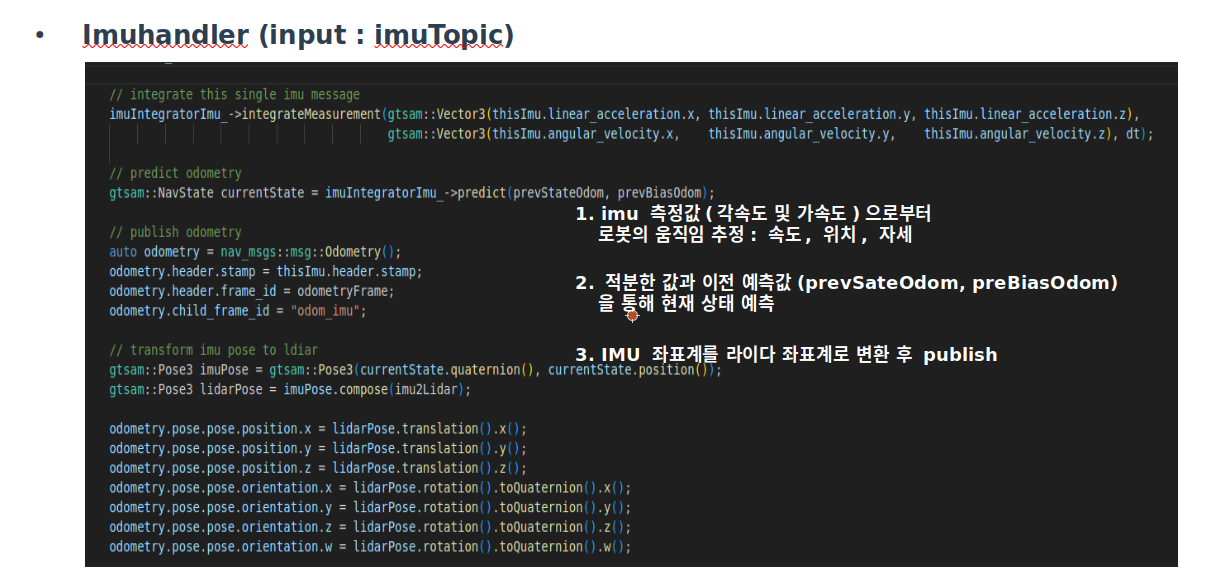
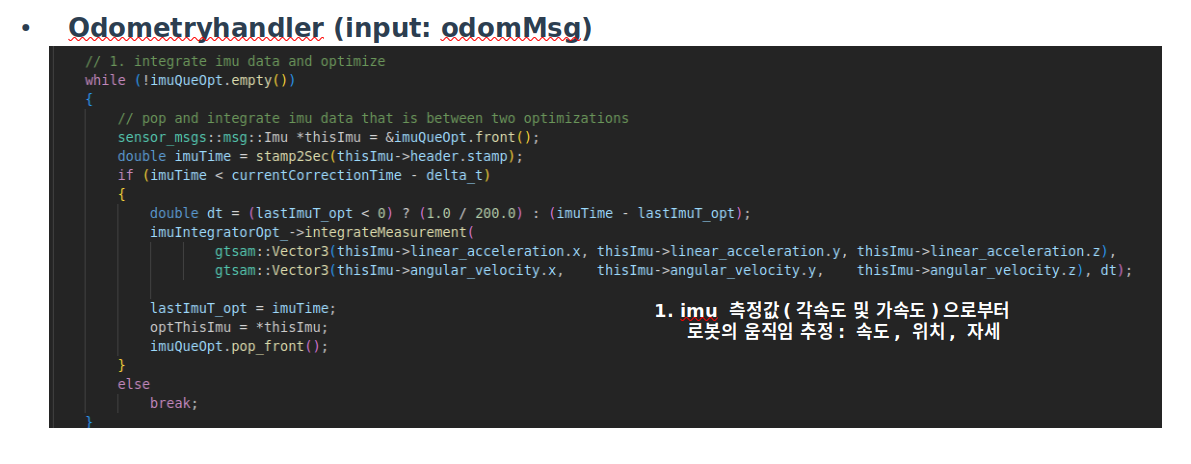
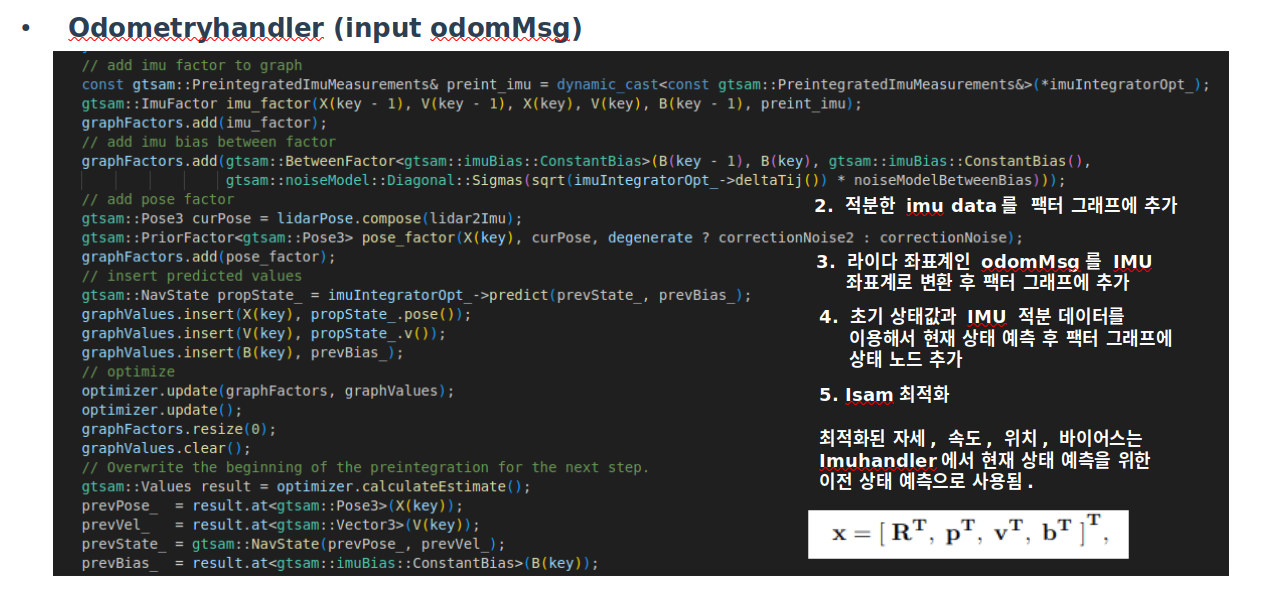
3.1 IMU Preintegration
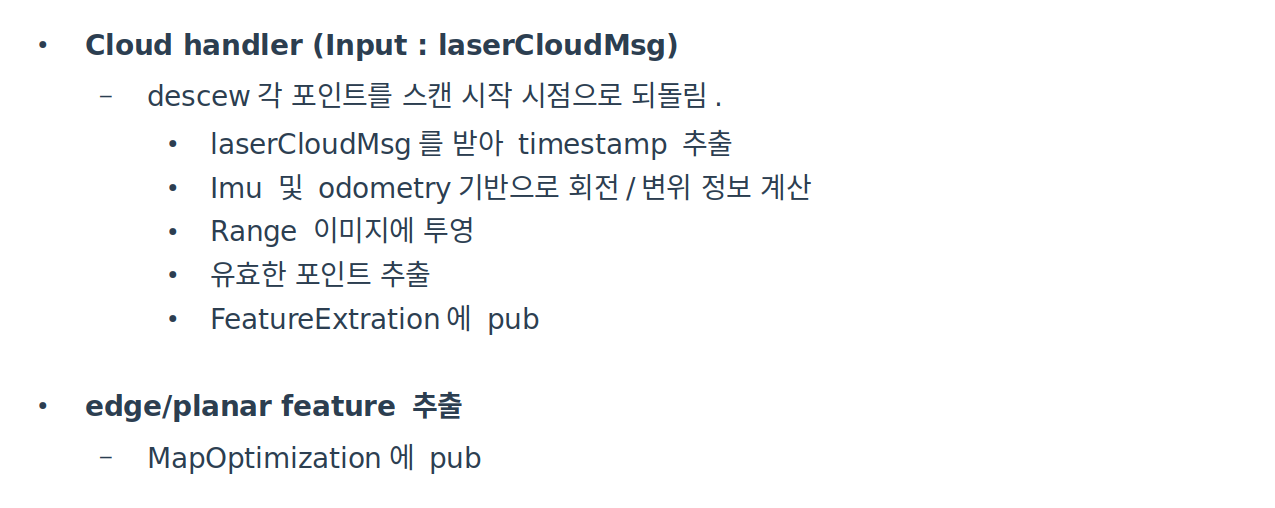
3.2 Image Projection / Feature Extraction
라이다는 한 프레임 안에서도 포인트마다 측정 시간이 달라 왜곡이 생기는데요.
이를 IMU 데이터를 활용한 deskewing으로 보정해 모든 포인트를 같은 시간 기준으로 맞춥니다.
그 후 Feature Extraction 단계에서 코너(edge)와 평면(surface) 포인트를 뽑아내어 SLAM에 활용합니다.
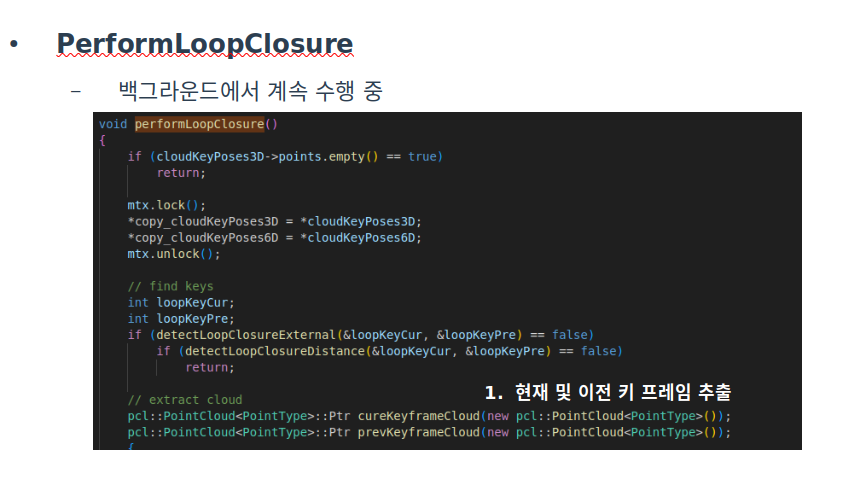
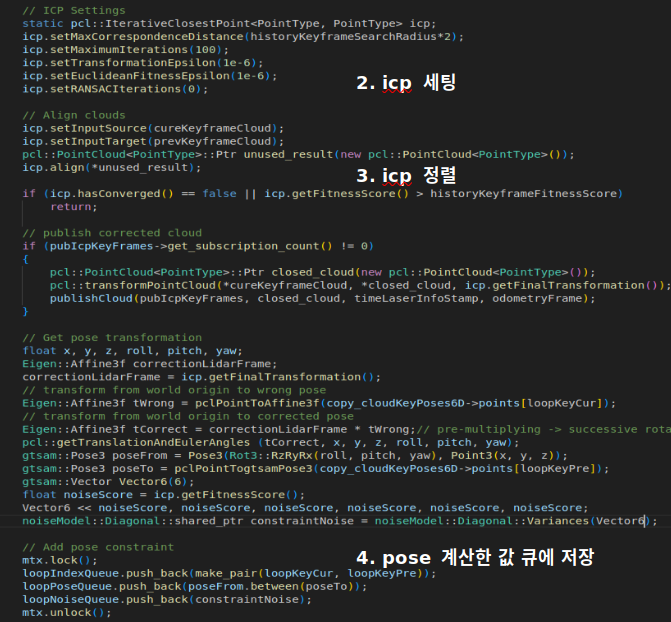
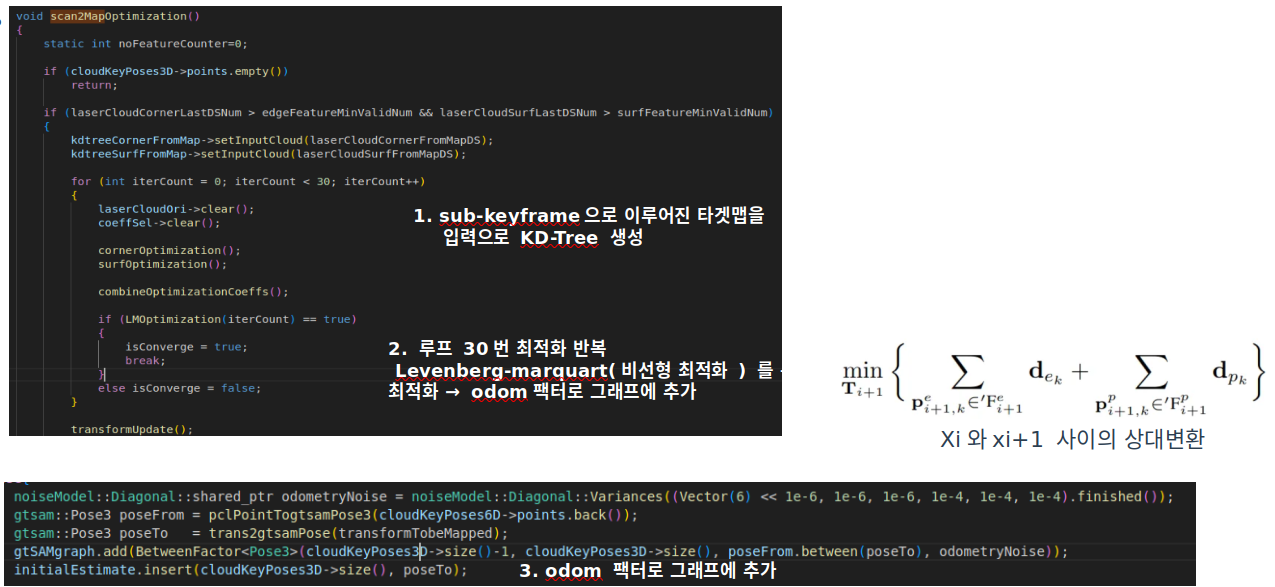
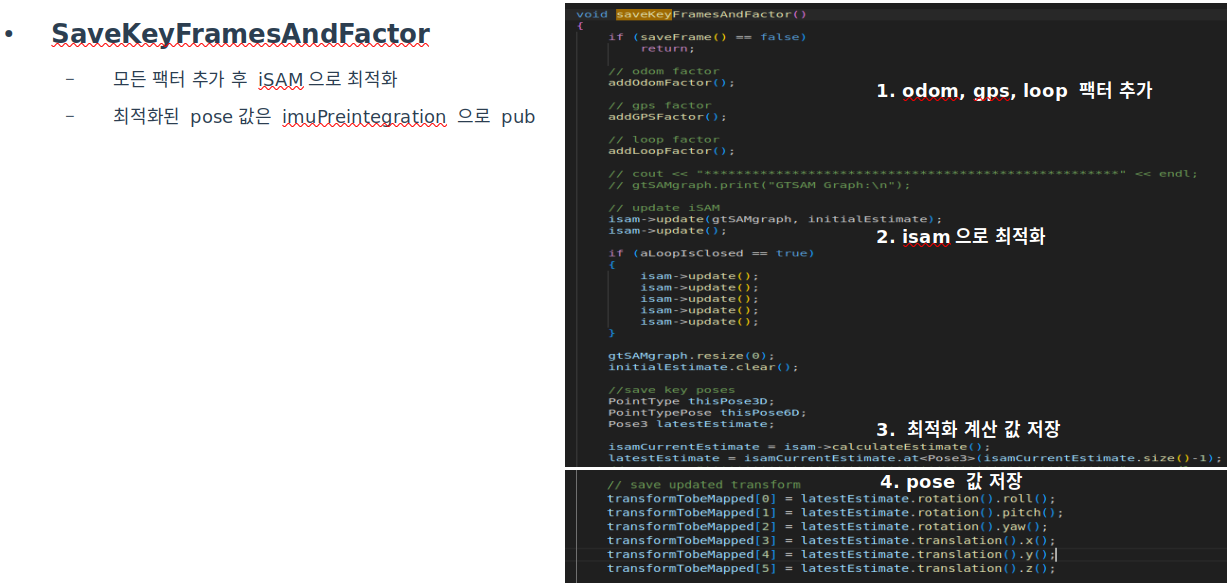
3.3 Map Optimization
1) loop-closure factor
2) odom factor 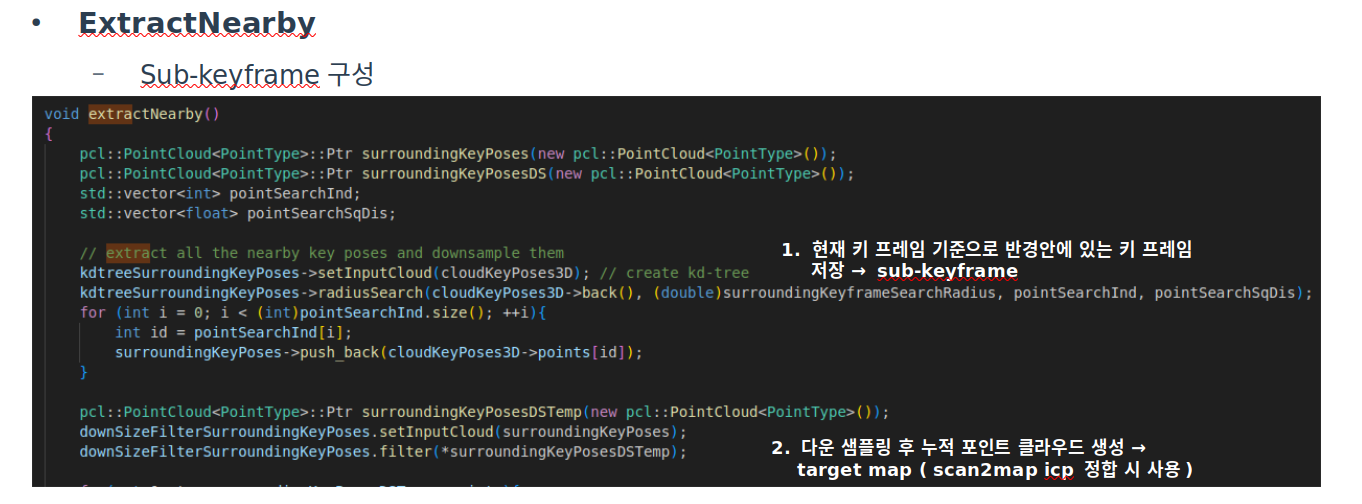
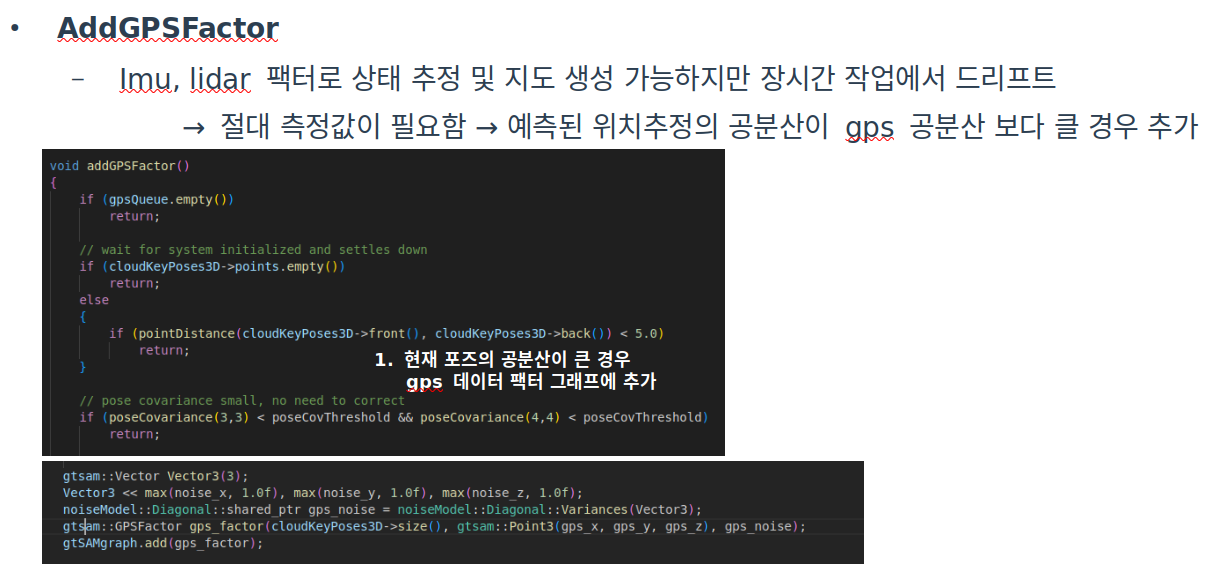
3) gps factor
4) 최적화
'논문' 카테고리의 다른 글
| LIO-SAM 논문 리뷰 (7) | 2025.08.26 |
|---|