Sparkfun사의 ZED-F9P RTK-GPS 사용법을 포스트하겠습니다.

참고한 사이트는 아래와 같습니다.
RTK F9P SOLUTION
📌Updating the Receiver Firmware
- 로버 수신기 펌웨어 업데이트
NMEA 축소 > UBX 확장 > MON 확장 > Version 확인
- Tools > Firmware
체크해제 'Enter safeboot before update'
📌Setting Up a Temporary Base
- Base를 고정해서 데이터 수신.
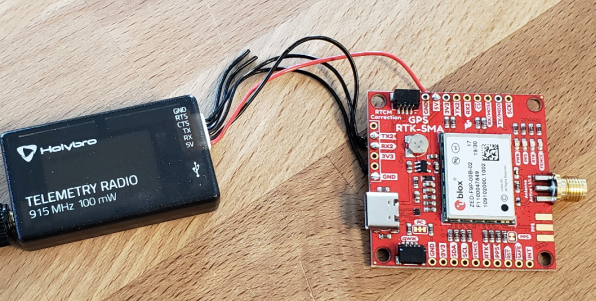
- Telemetry radio kit 이용해 RTCM 보정 데이터를 rover에 전송.
- Telemetry radio가 base에서 rover로 RTCM 통신에 적합.
- 포트 연결
- u-center 열고 보드 연결한 후에 windows가 생성한 해당 COM 포트에 연결.

- 모듈 구성
1) 라디오-ZED-F9P의 UART2 연결 가정
2) u-center 메시지 창에서 아래의 메시지를 UART2와 USB 모두 활성화 3) 이후 'SEND' 버튼
3) 이후 'SEND' 버튼

- RTCM 문장만 전송하도록 설정
- PRT > UART2로 설정 > 57600으로 설정 > SEND
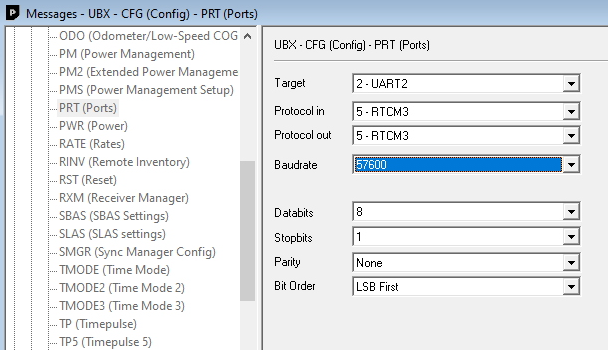
- UART2는 serial RTCM을 보내고 받는데 적합.
- USB는 RTCM 메시지가 출력되고 있는지 확인할 수 있도록 활성화됨.
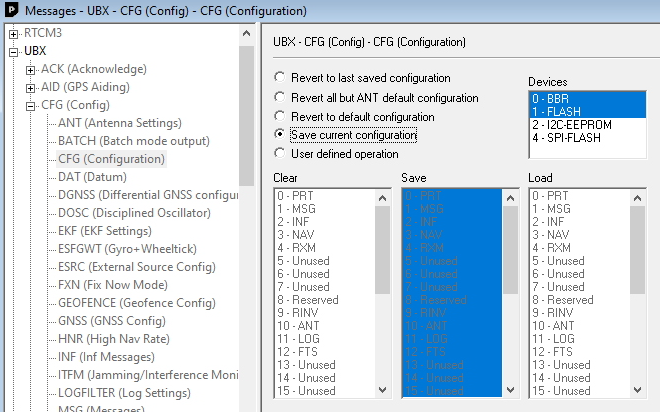
- 현재 설정 저장
- CFG > BBR : 배터리 백업 RAM > FLASH : 설정 플래시 메모리에 기록
- Survey in 초기화
1) CFG > TMODE3으로 이동
2) 모드 변경
3) 시간 변경 (관측 시간)
4) 정확도 변경 (필요한 정확도)
5) 'SEND'
- Survey 상태 모니터링
1) NAV로 이동
2) SVIN 우클릭후, Enable message 선택
⇾ 모듈이 이 레지스터 상태를 매초마다 보내도록 설정이 됨.
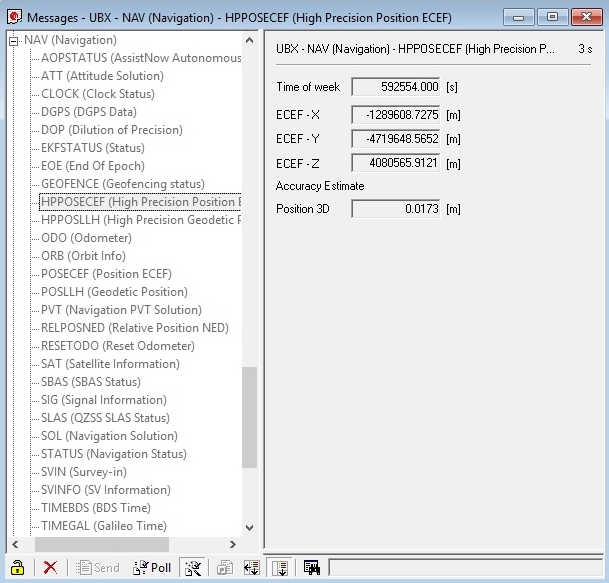
⇾ 60초 동안 데이터 수집하고 표준편차는 5m 이하로 작아진다. (위의 그림으로 예를 들어)
⇾ Survey, “complete” 라고 알림.
⇾ 최종적으로 모듈이 고정됨(fixed).
- Base 고정 확인
- NAV > PVT
- Fix Type이 'TIME'이면 Base를 성공적으로 설정한 것임.

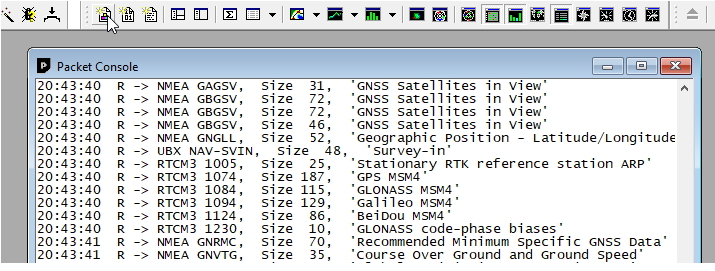
- 메시지 확인
- 포켓 콘솔 창열면 RTCM 메시지 확인 가능.
- 저장 및 로드
1) Tools > Receiver Configuration
2) 현재 설정 파일로 저장(Survey-In-Config.txt.으로 저장)
3) u-center 사용하여 로드
4) 로드 후 BBR/Flash에 기록해야함.
📌 Rover Setup
- U-blox에서 ZED-F9P를 로버모드로 설정
- 로버는 RTCM 보정 데이터를 받으면, RTK-Float / RTK Fix로 진입
- u-center 열고 로버 모듈에 연결
[준비]
1. UBX>CFG>PRT : 1. UART2로 구성 2. Baudrate 57600으로 설정 (베이스와 라디오 일치하게)
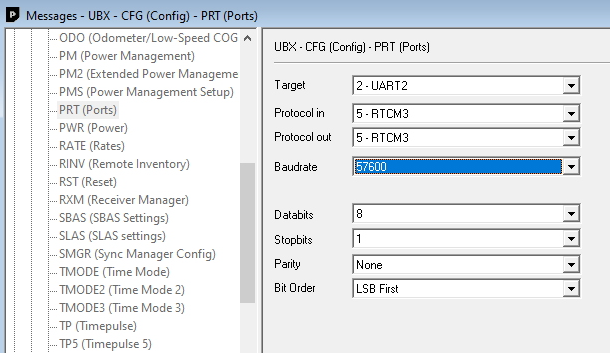
※ 모듈 설정에 문제 발생하면 ‘Revert to default configuration’ 선택하고 전송

- 아래와 같이 납땜. (telemtry와 zed-f9p 모듈)

[테스트]
1. Rover와 Base를 전원에 연결 ⇾ Telemetry radio가 서로 인식하고 직렬 데이터 전달.
2. Rover 상태 확인위해 u-center 준비.
⇾ 위치 정확도 NAV > HPPOSECEF
⇾ 수평 정확도 NAV > HPPOSLLH
⇾ 3D에서 RTK Float, RTK Fixed로 진행될 때 고정유형 보여줌 (NAV > PVT)
(Rover가 RTCM 수신하는 동안, 3D Fix > RTK Float > RTK Fix 빠르게 이동)
✔️ RTK LED ON = 일반 위성 모드, 비-RTK 모드
✔️ RTK LED 깜박임 = RTK Float, ~<500mm 정확도
✔️ RTK LED OFF = RTK Fix, 14mm acurracy
- 로버 RTK Fix 후 ZED-F9P는 UART1과 USB를 통해 고정밀 좌표를 출력.
정리
- 모듈을 전원에 연결
- Base가 Survey in 완료 후 무선 링크를 통해 RTCM 전송 시작
- 몇초동안 RTCM 수신한 후, Rover의 수신기 RTK Float ⇾ RTK Fix로 진입 후 높 은 정확도의 데이터 출력
다음 사진은 RTK가 고정되었을 때 화면이다.

'Sensor' 카테고리의 다른 글
| JT16 LiDAR 사용법 (3) | 2025.08.08 |
|---|---|
| LiDAR와 IMU 센서 동기화 (1) | 2025.08.03 |
| Ouster 라이다 설치 및 실행 (1) | 2025.07.29 |